




Laseranálise e processamento de sinais de detecção remota de fala
Decodificação do ruído do sinal: análise e processamento de sinais na detecção remota de fala por laser.
No maravilhoso mundo da tecnologia, a detecção remota de fala a laser é como uma bela sinfonia, mas essa sinfonia também tem seu próprio "ruído" – o ruído de sinal. Assim como uma plateia inesperadamente barulhenta em um concerto, o ruído costuma ser perturbador.detecção de fala a laserDe acordo com a fonte, o ruído na detecção remota de sinais de fala por laser pode ser dividido, de forma geral, em ruído introduzido pelo próprio instrumento de medição de vibração a laser, ruído introduzido por outras fontes sonoras próximas ao alvo da medição de vibração e ruído gerado por perturbações ambientais. A detecção de fala a longa distância exige, em última análise, a obtenção de sinais de fala que possam ser reconhecidos pela audição humana ou por máquinas, e a presença de muitos ruídos misturados, provenientes do ambiente externo e do sistema de detecção, reduz a audibilidade e a inteligibilidade dos sinais de fala adquiridos. Além disso, a distribuição da banda de frequência desses ruídos coincide parcialmente com a distribuição da banda de frequência principal do sinal de fala (aproximadamente 300 a 3000 Hz). Portanto, não é possível filtrá-los simplesmente com filtros tradicionais, sendo necessário um processamento adicional dos sinais de fala detectados. Atualmente, os pesquisadores estudam principalmente a remoção de ruídos de banda larga não estacionários e ruídos de impacto.
O ruído de fundo de banda larga é geralmente processado por meio de métodos como a estimativa de espectro em curto prazo, o método de subespaço e outros algoritmos de supressão de ruído baseados em processamento de sinais, bem como por métodos tradicionais de aprendizado de máquina, métodos de aprendizado profundo e outras tecnologias de aprimoramento de fala para separar os sinais de fala puros do ruído de fundo.
O ruído impulsivo é o ruído de speckle que pode ser introduzido pelo efeito de speckle dinâmico quando a localização do alvo de detecção é perturbada pela luz de detecção do sistema LDV. Atualmente, esse tipo de ruído é removido principalmente pela detecção da localização onde o sinal apresenta um pico de alta energia e sua substituição pelo valor previsto.
A detecção remota de voz a laser tem aplicações promissoras em diversas áreas, como interceptação, monitoramento multimodal, detecção de intrusão, busca e salvamento, microfones a laser, etc. Pode-se prever que a futura tendência de pesquisa em detecção remota de voz a laser se baseará principalmente em: (1) aprimorar o desempenho de medição do sistema, como sensibilidade e relação sinal-ruído, otimizando o modo de detecção, os componentes e a estrutura do sistema; (2) aumentar a adaptabilidade dos algoritmos de processamento de sinal, para que a tecnologia de detecção de voz a laser possa se adaptar a diferentes distâncias de medição, condições ambientais e alvos de medição de vibração; (3) selecionar alvos de medição de vibração de forma mais adequada e compensar as altas frequências dos sinais de voz medidos em alvos com diferentes características de resposta de frequência; (4) aprimorar a estrutura do sistema e otimizar ainda mais o sistema de detecção.
Miniaturização, portabilidade e processo de detecção inteligente.
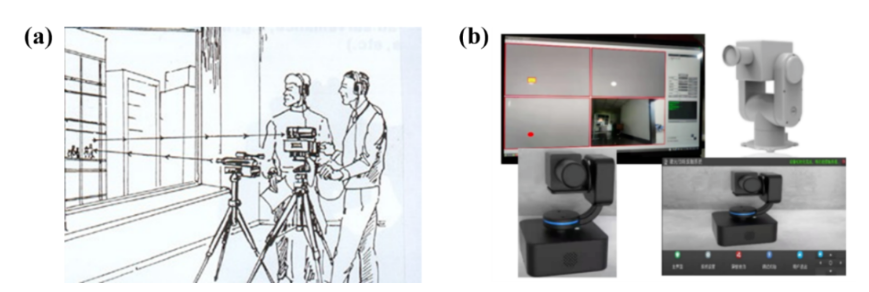
FIG. 1 (a) Diagrama esquemático da interceptação a laser; (b) Diagrama esquemático do sistema anti-interceptação a laser
Data da publicação: 14 de outubro de 2024